CONTINUITY
"Laboratory on Legs"
Compact Stowage and Deployment
The first challenge in planetary exploration is reaching the destination. Continuity is designed for exceptional portability, featuring a deployment sequence that transforms it from a compact, stowed configuration into a mission-ready state. This phase is critical for fitting the rover into a lander's limited payload bay, ensuring it can be safely transported to its destination. Continuity can be integrated into the lander using a custom, modular anchor platform that draws minimal power during the traverse, allowing the rover to remain in sleep mode. Once on the surface, the rover can autonomously disconnect from the lander and position itself on the ground.
Mission Profile and Capabilities
Once deployed, Continuity stands ready to begin its scientific mission. Because it aims to be the first legged robot to operate in a planetary exploration mission, its main objective is to act as a technology demonstration. The primary purpose is to test the hardware and software. As a second objective, we aim to use Continuity as a "Laboratory on Legs", carrying small instruments like a spectrograph or a Ground Penetrating Radar (GPR).

Transparent Legged Locomotion
The heart of Continuity's mobility lies in its control algorithm. SPARCbandit (Stochastic Planning & Auto-Regressive Contextual Bandit) is an interpretable AI agent designed for resource-constrained robots. It learns incrementally and adaptively, prioritising explainability and minimal resource usage. SPARCbandit is trained before the mission, and during surface operations, it selects from a set of predefined movement strategies the best to operate safely, adjusting the robot's behaviour based on terrain feedback and internal state. The algorithm is fully transparent, interpretable and purposefully avoids the use of Neural Networks due to their black-box nature.
Payload Integration and Inspection
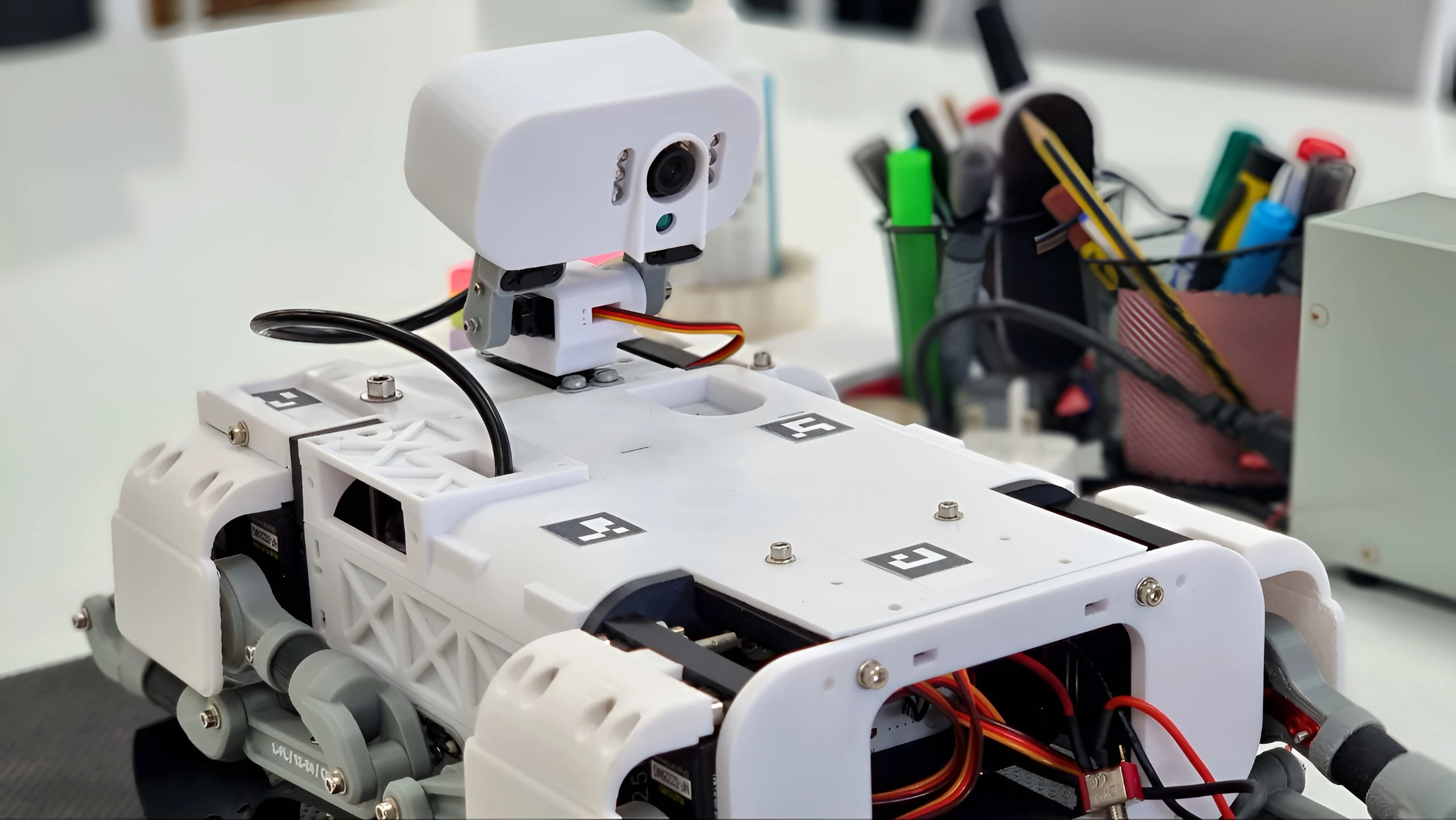
A robot is only as good as the tools it carries. Continuity's design includes a dedicated payload area and a versatile way to monitor it. Continuity's head, called Remote Sensing Mast (RSM), features a sensor suite that can rotate 270°. It can be used to take photos, panoramas, but it can also be used to monitor the status of scientific instruments. This capability is vital for mission autonomy, allowing the rover to check the environment and do self-diagnosis, ensuring its payload is functioning correctly. The RSM sensor suit includes an RGB and IR camera (MastCam) and ToF sensors.
Technical Deep Dive
Explore the engineering details, SPARCbandit algorithm, and payload specifications.
Technical Blog